爆肝3天装机搭配~看了各种攻略~总算是磨出来了~欢迎各位大佬评论区指点 配置如下: CPU:AMD R7 9800X3D 主板:技嘉B650E冰雕 内存:金百达星刃RGB6000C28 24G*2 硬盘:致钛TiPlus 7100 2T 显卡:影驰5070 12G金属大师 水冷:先马ZW360ULTRA 锋幻 电源:先马XP1200SUPER雪装 机箱:先马境界Magic 风扇:先马境界V5 系统:WIN11 24H2
我国新战机歼35,到底有多牛?真的能“歼灭F35”吗?
-
本期视频以牛客网SQL练习题为例,逐层拆解SQL同时在线问题解题步骤! 观众老爷们记得一键收藏,点赞+关注~ 想要了解大数据学习可以后台私信~ 咨询交流v: dsflink
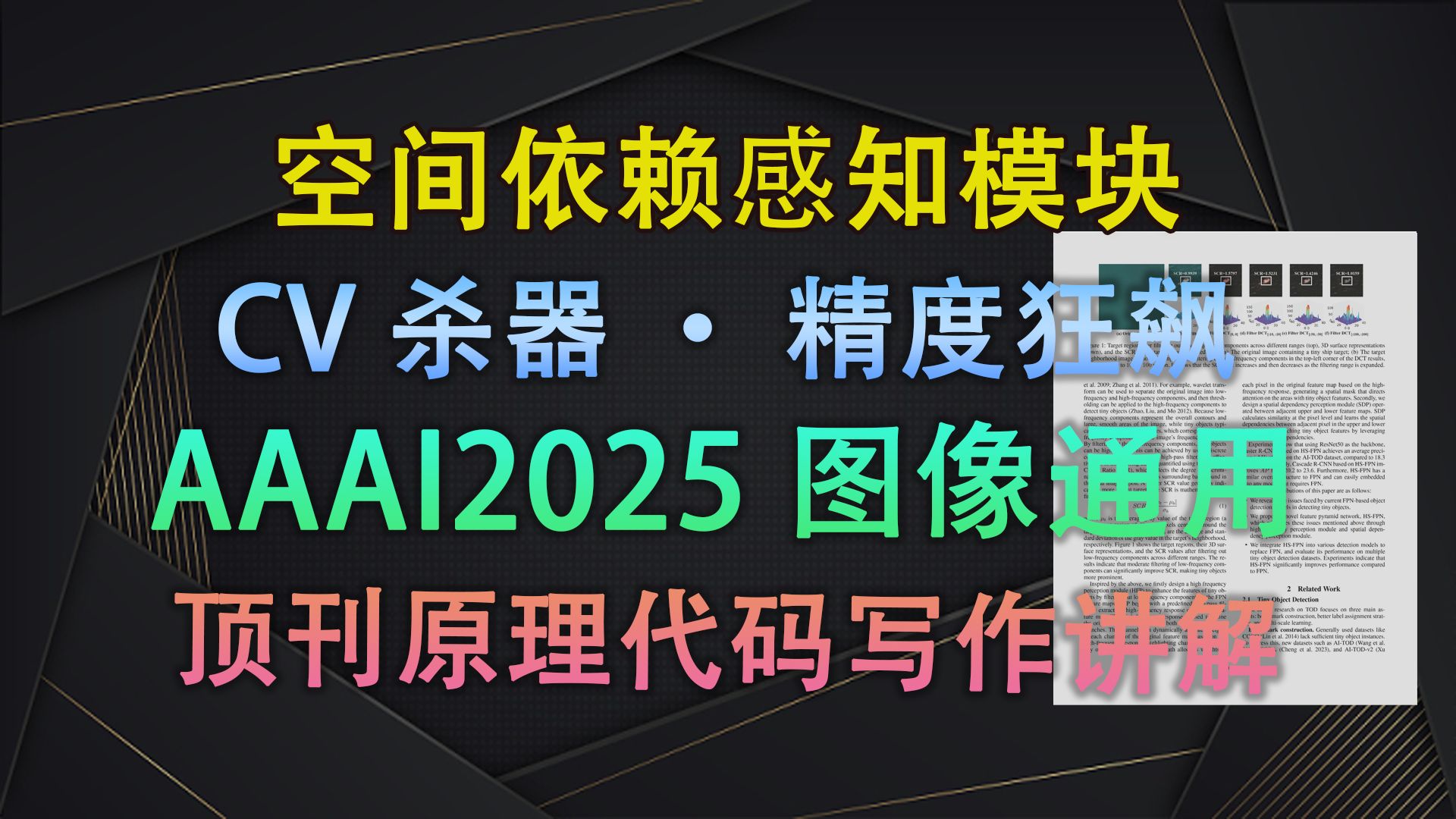
空间依赖感知模块(Spatial Dependency Perception Module,SDFM): 实际意义:①空间融合缺陷:FPN递归上采样导致上下层特征图中小目标位置错位,仅通过像素级加法融合特征,未建模像素间的空间依赖关系。 ②小目标空间信息缺失:小目标特征易被背景噪声掩盖,传统方法无法聚焦局部区域,上层高语义特征与下层细节特征缺乏有效关联,特征表达不完整。 实现方式:①输入上层特征图A与下层特征图B。 ②特征映射生成:通过1×1卷积分别从特征图A生成查询(Q),从特征图B生成键(K)和值(V)。 ③特征块划分:将 Q、K、V划分为多个特征块,对每个特征块计算 Q与K的像素级相似度矩阵。 ④加权融合:用相似度矩阵对 V 进行加权聚合,生成空间依赖信息特征。⑥输出整合:将特征块按空间位置拼接,与原始输入相加,得到增强后的特征图。
平常作为一位Coser和up主,一般都是别人在拍我,这次我作为一位摄影师第一次拿起稳定器去拍另一位Coser,原来拍视频也没有那么难!
华为产品全是坑,工业垃圾低全线“翻车”
172号卡 某世界 某易三大号卡分销系统 佣金对比 流量卡代理 一级平台注册 货源渠道 四大运营商直签供货 招募 零门槛 零成本 副业兼职 平台新手小白创业
mini花絮:可爱小猫小狗 和温馨小家
同时存在这5种病毒,电脑完蛋了!
为什么对大炮放平这么执念呢?#军事科普
综合 0