-
歼-20S世界首款双座隐形战机亮相,国外热议:看起来更加雄伟!
德州永泰机械联系电话18633681882满足火车装卸要求,且移动方便灵活#移动装卸机#火车装卸机#多功能装卸一体机#省时省力省人工 #物流 #运输
码垛机器人饼干码垛自动化”指通过工业机器人集成系统,针对饼干产品(多为盒装/袋装后成箱)的特性,自动完成饼干箱从输送线抓取、按预设垛型(如“井”字、“田”字)堆叠至托盘,实现饼干仓储前码垛环节无人化作业,是饼干规模化生产中衔接包装与仓储的核心自动化技术。
把握不住,全靠审核。侵删。
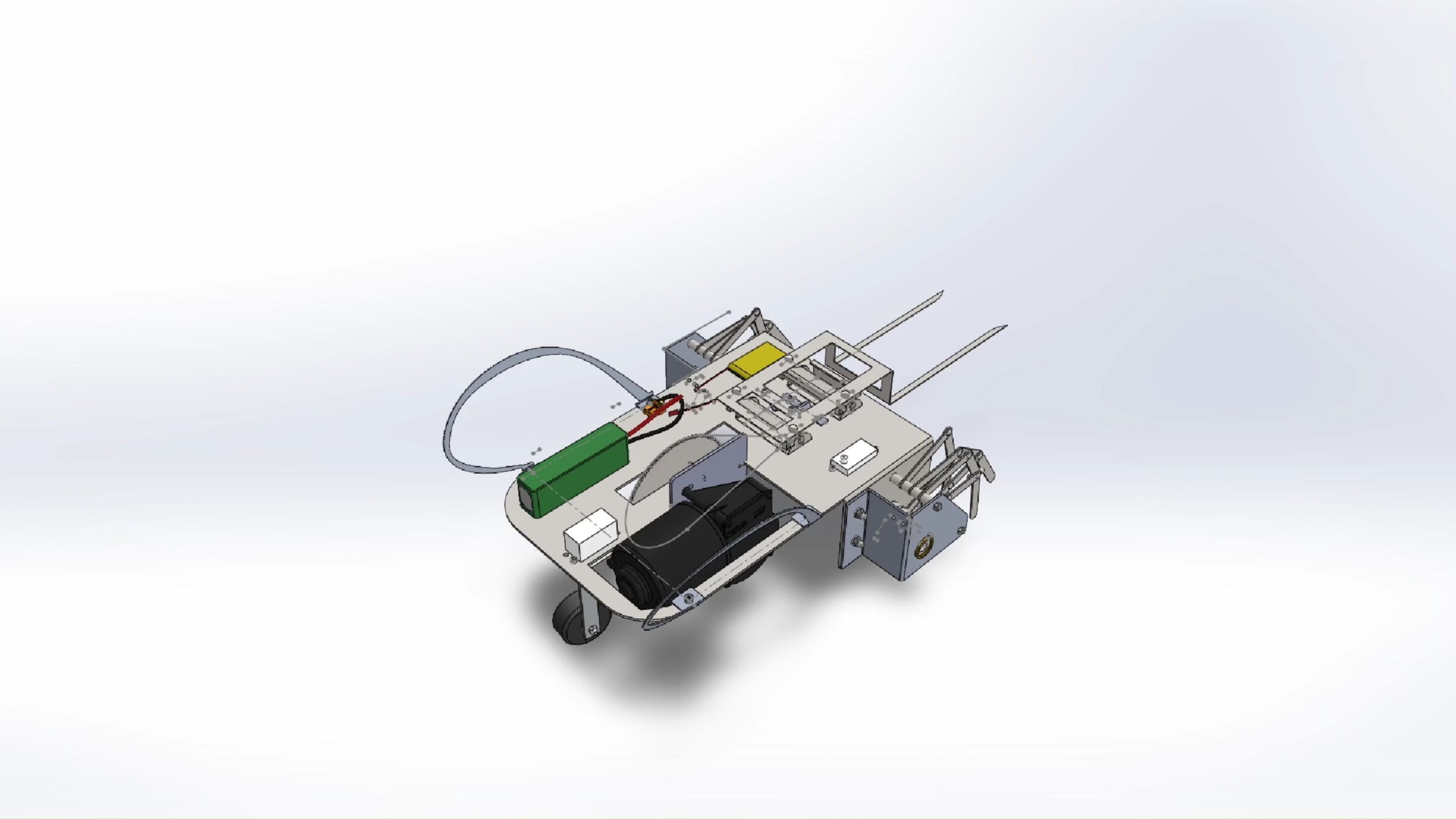
“蝎式”探勘机器人是一种非常适合消防救援、家庭娱乐、资源开发探索、农业林业发掘的既经济又安全的工具,它具有安全、结构简单、重量轻、尺寸小、造假低的优点,并且它的活动范围大、前端两个传动模块模仿蝎子移动,能够通过崎岖复杂地形,探索各种危险、资源丰富的地区,在遇到崎岖的地形时,利用前爪通过性和爬坡能力超强的优点,能够顺利到达人类无法到达的地方,反馈人们向要得到的数据或想达到的目的,降低人员受到伤害的概率,提高探索开发成功率,让探索发掘智能化、也更加安全化。
打磨机抛光片 四面抛光机木工(1)
三缸窄体柴油版滑移装载机实心胎能进电梯
PHA-107地坪防水涂料,存放的房间内,严禁吸烟或使用明火。
昊轩耐磨材料专注尼龙加工件。它以尼龙为原料,有多种优良性能,成型快效率高,能制作多种零件,应用广泛。厂家秉持品质与服务至上理念,期待成为您的伙伴。
PHA-107地坪防腐涂料,远离热源,避免日光直接照射并隔火种。
科工机械 0