编程高手当师傅,助力拿offer 评论区有【30天带你学会C语言】学习包,等你来戳戳领取哦~
-
太意外了我敲!!!!!
粉粉嫩嫩的,谁能拒绝呢?
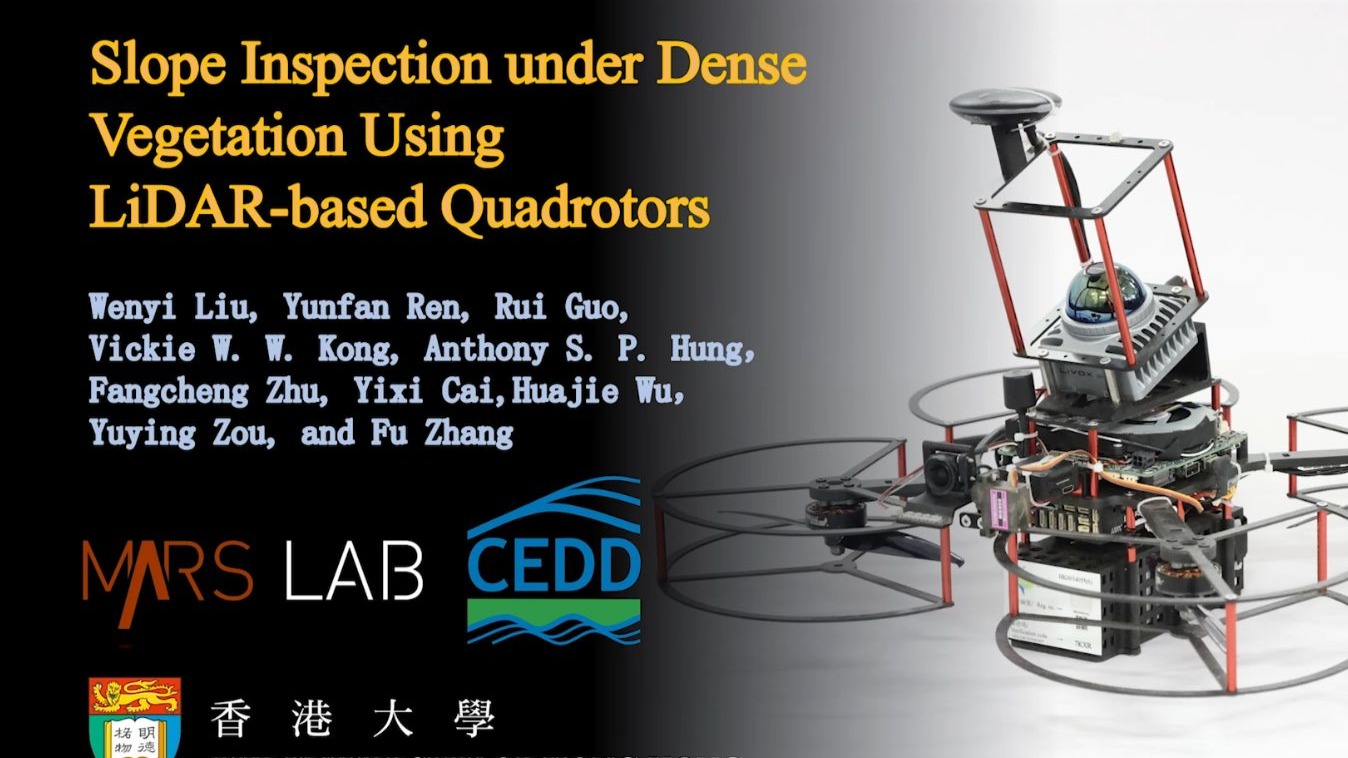
Nature Communications论文:Slope inspection under dense vegetation using LiDAR-based quadrotors 论文链接:https://www.nature.com/articles/s41467-025-62801-y 开源代码:https://github.com/hku-mars/slope_inspection 山体滑坡对居民安全和日常生活构成严重威胁。为减轻此类风险,通常会修建柔性防泥石流屏障等设施并进行定期检查,即边坡巡检。然而,传统的人工巡检因地形陡峭、植被茂密而面临高成本和高难度。搭载激光雷达和摄像头的无人机具有高机动性,非常适合开展边坡巡检。然而,现有无人机方案缺乏能够应对茂密植被挑战的完整框架,包括鲁棒定位、高精度建图、躲避细小及动态障碍物,以及在树冠下复杂环境中的自主导航。为解决这些问题,我们研发了一款基于激光雷达的四旋翼无人机及其完整的软件系统。该系统具备辅助避障功能,能够在执行飞手指令的同时安全穿越树冠下的杂乱环境。与香港土木工程拓展署(CEDD)合作开展的实地实验表明,该无人机能够有效规避小型障碍物并在茂密植被中灵活飞行,验证了其在边坡巡检中的实际应用潜力。 本研究得到香港土木工程拓展署(CEDD)的支持。感谢所有合作者的付出。 剪辑:@风云323 ,@炸猪排只能看星星 研发:@风云323 ,@帆帆烦翻翻 ,@炸猪排只能看星星 ,@Fangzzz_ ,@我是EC呀 ,@一粒兔儿糖 ,@zyyinglf 等
某鱼:秋染烟的摄影小屋
【裸眼3d/影视】阿凡达3 预告!
软工和计科之间没有对比就没有伤害!大三才知道的我有点晚了啊...
Windows权限审核机制(6)特权 Priviledge -1
磁轴界天花板—八宝轴,更快更稳,新品上市闷声版!!!
我做了全网第一个刷笔资源站!
综合 0