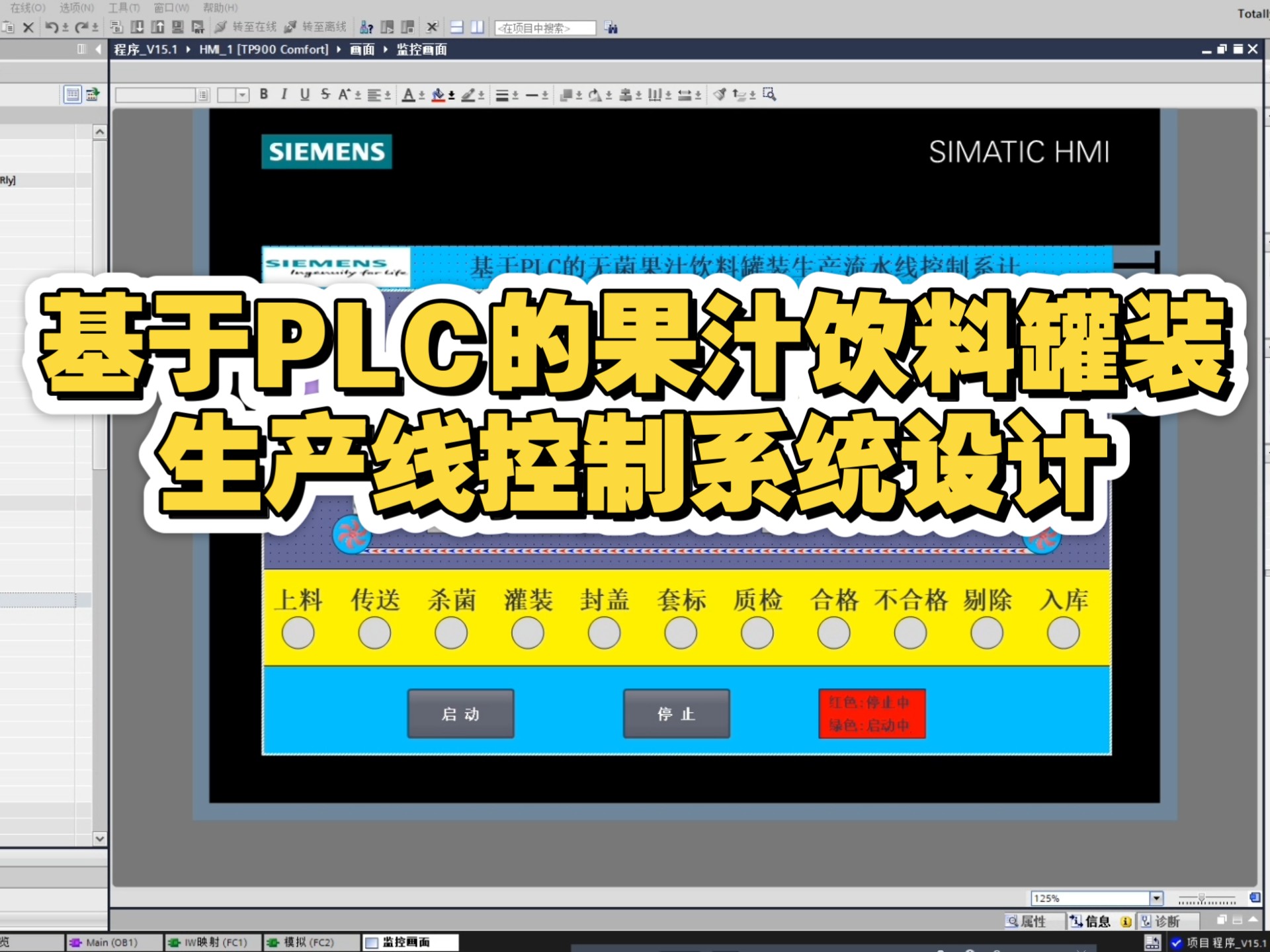
本设计围绕无菌果汁饮料生产展开,由于生产过程中微生物控制有一定难度,传统人工控制精度不太够,所以设计出一套基于PLC的全流程无菌保障系统。该系统以西门子CPU1214C PLC作为核心控制器,构建了包含预处理灭菌、无菌环境维持、精准灌装以及在线监测等功能模块的完整控制体系。在灭菌环节,系统借助PID算法精确控制UHT灭菌温度,使误差大概在正负百分之五,同时利用电导率传感器实时监测HO灭菌剂浓度。维持无菌环境方面,通过差压传感器与变频风机联动控制,让洁净区正压保持在5到10帕。灌装单元由伺服电机驱动,配合流
https://youtube.com/shorts/QKuqPG0YDbc?si=EPqPd3shvxXqWd2I Hornet #silksong #hollowknight #3dprinting #shorts #viralvideos #mini #painting
-
Github:https://github.com/fatihak/InkyPi
基于STM32H755的远程遥控小车
美的空调柜机3匹 舒适星 新一级能效变频冷暖 无风感家用空调立式 舒适风 家电以旧换新 国家补贴20%
Model #001
用nano banana做了一款AI 光影匹配器
U1 视频指南:如何将 SnapDryer 与 Snapmaker U1 配合使用
微星游戏电竞显示屏,3ms疾速响应,让竞技画面流畅不拖影。打游戏、看大片都细腻清晰,快人一步的沉浸体验,真实提升使用满意度。
拓竹P2S 碰玻璃解决方案。
极客DIY 0