全星全频高精度定位模块,厘米级精确的位置和方向信息,厘米级定位,全系统全频点,搜星性能强,抗干扰能力强,地图追踪
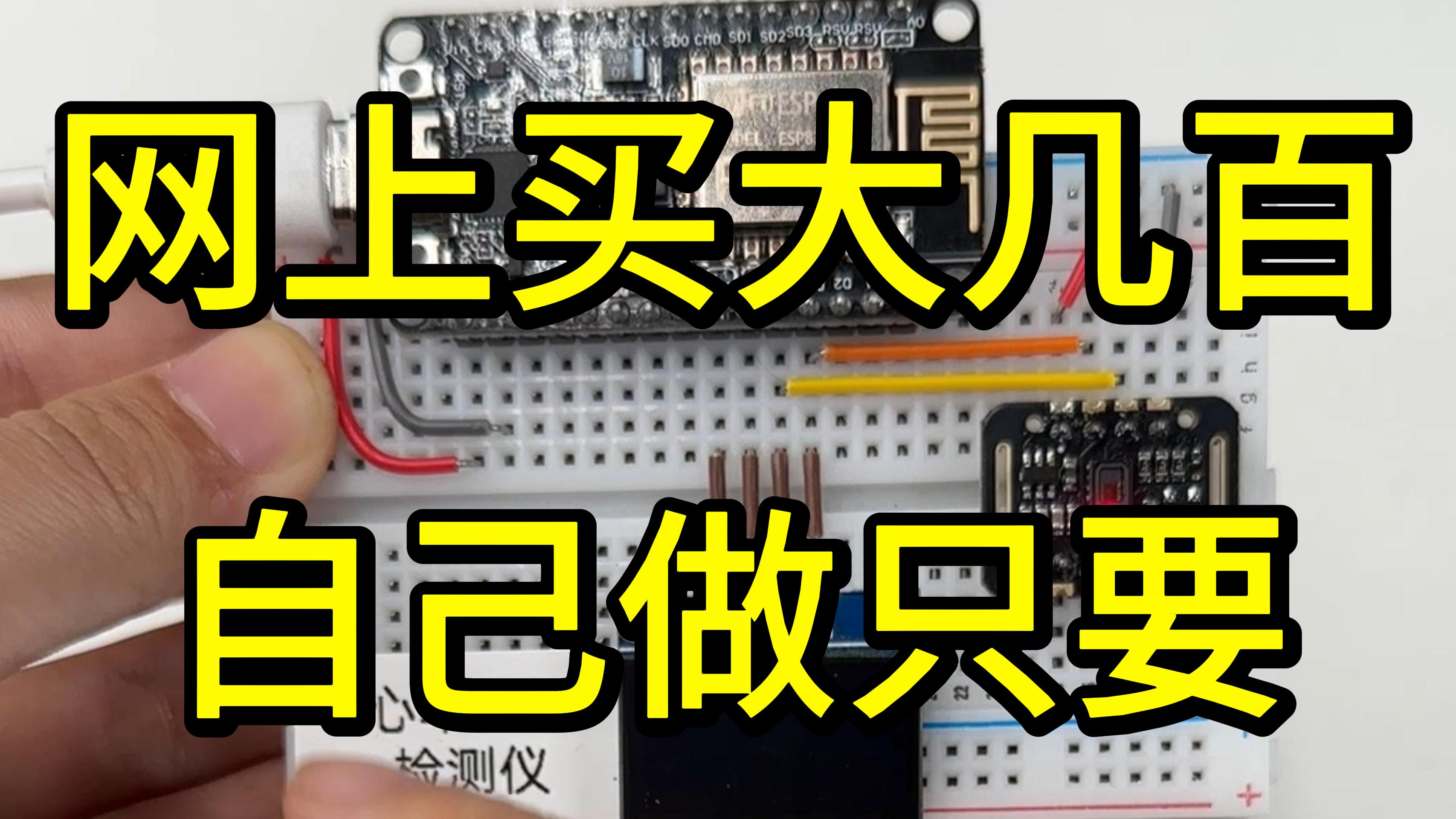
网上买大几百自己做竟然
网络 58 Cool 3D PRINTING Ideas That are at Another Level
-
青春潮 黑胡桃木实木电视柜 岩板电视柜 意式简约别墅电视柜 岩板面(220_45_48cm)
广告太多了怎么办
闲 淘 搜 易捷电玩 QQ 277348260
Model #001
用nano banana做了一款AI 光影匹配器
U1 视频指南:如何将 SnapDryer 与 Snapmaker U1 配合使用
微星游戏电竞显示屏,3ms疾速响应,让竞技画面流畅不拖影。打游戏、看大片都细腻清晰,快人一步的沉浸体验,真实提升使用满意度。
拓竹P2S 碰玻璃解决方案。
极客DIY 0