英国英语发音在50分钟内 - 您需要的所有150个单词(+免费发音电子书) British English Pronunciation in 50 Minutes - ALL 150 words you need (+ free Pronunciation Ebook)
-
充电可看所有完整视频~ 致远OA A6、A8、V5、V8培训视频及资料包括: 1、内部完整教学视频近2000部,覆盖各类别、各场景、各模块等; 2、各类前后端开发技术文档,包括:入门教程资料、前后端二次开发资料、接口文档等。
兰州正在大量招聘,男女不限,学历不限,年龄不限!!!
60天通关公共营养师三级考详细计划
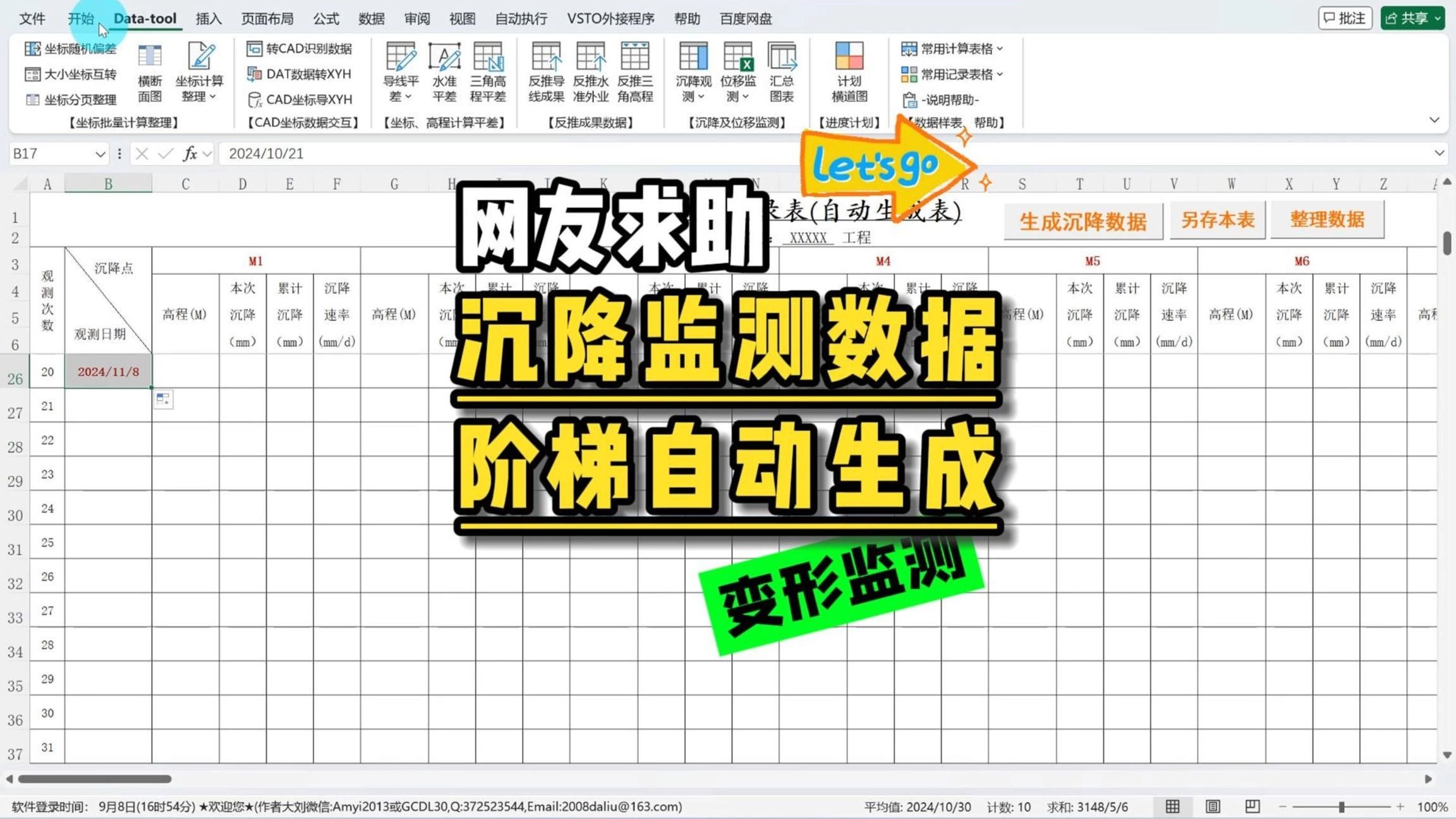
沉降监测数据阶梯自动生成!
【视频和押题卷完】2025一建考前预测(提升卷-机电-考前三套卷-小超人-提升卷视频
同步练习168页31题
【王克】2025年一建机电实务考前抢救班(补充内容)(内附讲义)
竖曲线讲解计算案例7
不想被拿捏,2个要点
职业职场 0