有人欢喜有人忧啊
ytb
https://www.youtube.com/watch?v=bzsQJBK64_s
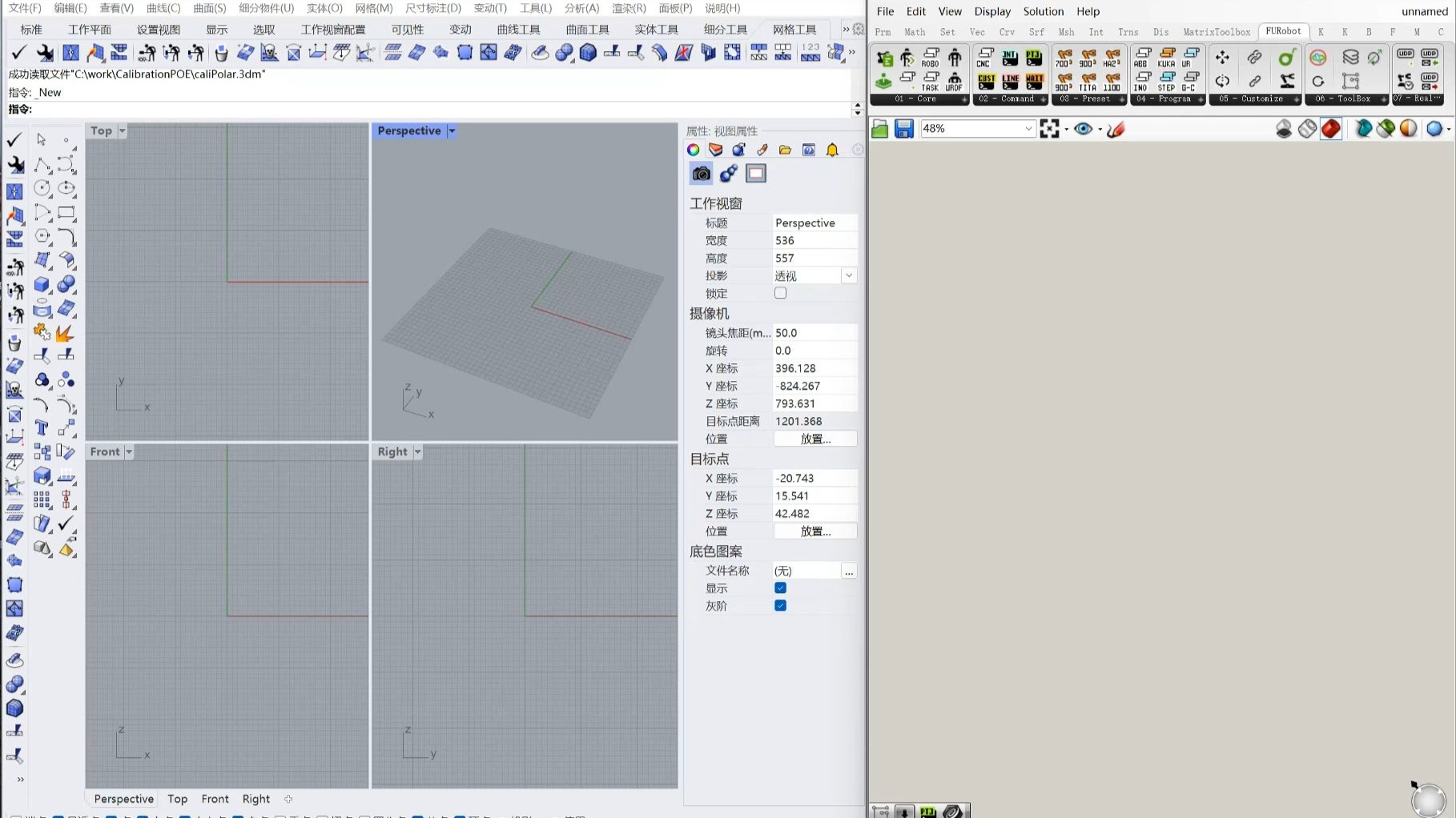
校正机械臂的绝对精度!首先你要先用furobot自定义一个机器人(看之前的教程),然后在用全站仪等方法来测量这个机器人末端的空间位置(相对于世界坐标系,也就是机器人的根坐标系,单位是m,如果不能相对于机器人的根坐标系,也要想办法用变换矩阵变换过去!),记录下末端的xyz(即工具头的tcp末端,如果不是,则必须在tool这里更换,类似视频00:55 的操作)和关节(单位是m和弧度),记录的样本越多越好,本例是50个,然后就可以用这个方法来更新机器人的运动学参数,这样就可以让机械臂运动在绝对位置上更加精确(精
后续会更新更多3D建模视频,欢迎关注~~
【资料】:無偿获取通信工程师考试配套知识点集锦、模拟题、真题、考前几页纸等资料(看评论区)。 【答疑】:大家学习过程中有任何问题,会第一时间回复大家(评论里提问)。
https://www.youtube.com/watch?v=a3KOsHEzv-o https://www.youtube.com/watch?v=uYHdiIK663w https://www.youtube.com/watch?v=M5nUUXX_wAY https://www.youtube.com/watch?v=W3UxBYjPTT8
-
Q4新变题,10月启动新的考试方案,那我们如何应对?
翻转瓶子挑战丨21-快结束,我饿了。
紫薇在子,格局图
RoV : Toro โตโร่แทงค์ที่เถื่อนที่สุดNo.1 เซ็ทเผา4นี่มันแทงค์ไฟท์เตอร์ !! - Hutto
更新事件配表,加入过程类型(单一、平行、阻塞、平行+阻塞)|棋盘游戏|游戏策划|项目管理|深度智能|AI+【亚瑟斯洛歌ArthurSlog】
阿尔法三代撑小孩哥通勤鞋了
野生技能协会 0