二叉树层次遍历
PS学习交流 (南极有什么→ 动物 群 :821582994) 安装包、视频配套笔记、素材*技能提升请戳:https://www.bilibili.com/read/cv42120115
OZON跨境电商运营技巧,做ozon不会作图怎么办?ozon作图工具
很好的快乐周二
AE新版P粒子插件添加拖尾效果
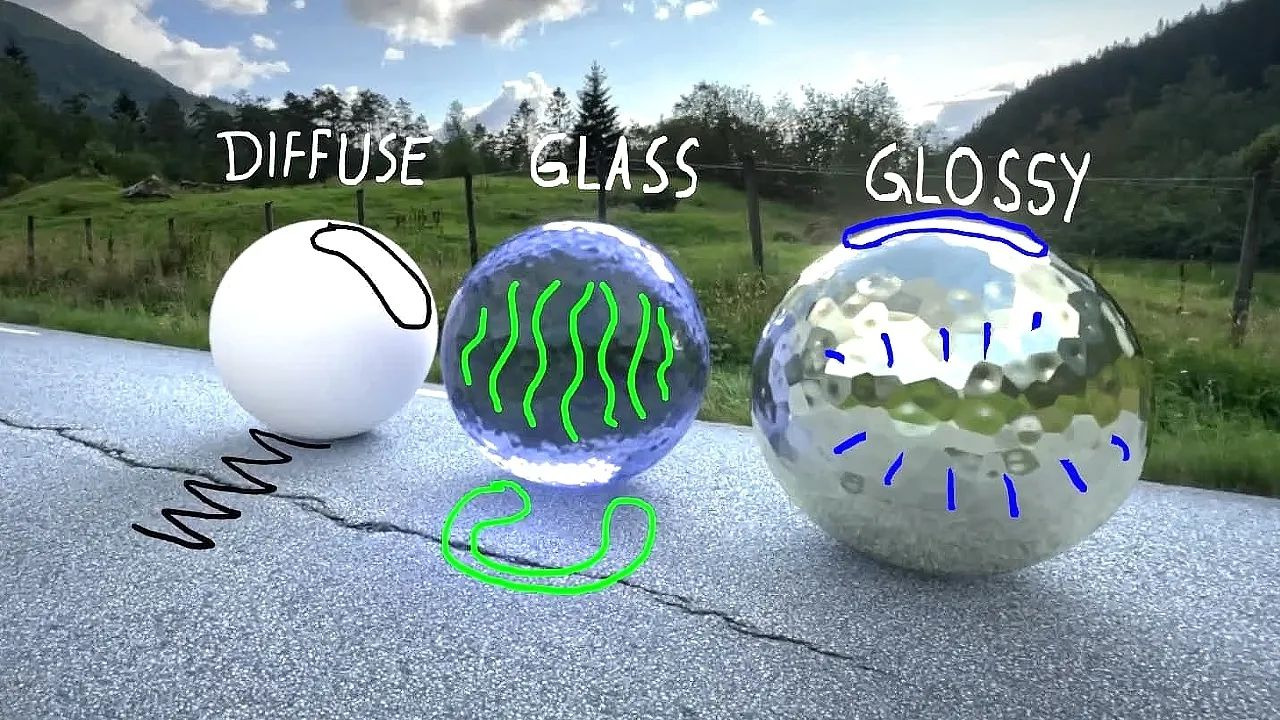
Polyfjord
观看这段在 GDC 2025 上录制的视频,了解 Kids Web Services (KWS) 如何在《堡垒之夜》中处理家长同意和验证。 Kids Web Services 已成功验证了超过 2500 万名家长,并支持《堡垒之夜》和其他大型游戏账户系统的数十亿用户设置。 观看本视频,了解 KWS 在可扩展性、可靠性和适当数据处理方面的指导原则。
-
【2025最新PR教程】Premiere保姆级教程 | 影视剪辑零基础入门到精通教程 | PR影视后期制作 | 视频剪辑后期特效制作 | 系统教程全套
【PPT办公软件教程】PPT保姆级教程 | 手把手带你从小白到大神 | 职场办公软件精通教程 | 全程干货无废话 | B站最用心的office办公软件教程
Notion美化技巧与实用窍门
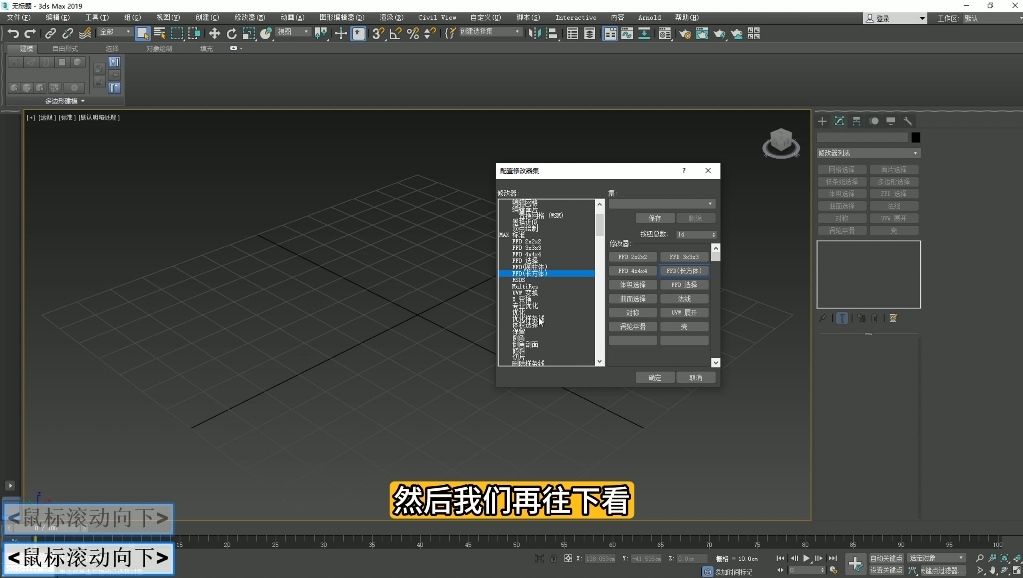
【3dmax建模】(iPhone 17)建模案例,零基础布线讲解,3dmax新手建模案例教学
给学员看代码直接把我电脑关机了
野生技能协会 0